Styrgeometri
Trehjuliga fordon med 2 hjul fram som styr.
av Göran Nicklasson
En sammanställning av fakta över styrgeometri.. Jag är
ingen expert på det här och hittar du något som är
fel så ta kontakt med mig så jag kan rätta det. Har däremot
läst en hel del om detta och har översatt och skrivit om så
att förhoppningsvis alla kan förstå det. Försöker
sprida lite kunskap till de som behöver det. När det gäller
dina egna bygge så ska jag försöka komma med lite riktlinjer
så att du får det så rätt som möjligt meddetsamma
. Kan du experimentera och kommer på något bra så skriv
och berätta. Länkar till hjälp för att kunna beräkna ackermann etc kommer i slutet
av dokumentet.
För att få det här med styrgeometrin rätt så
måste man förstå vad som krävs för att en sväng
ska kunnas göras på rätt sätt.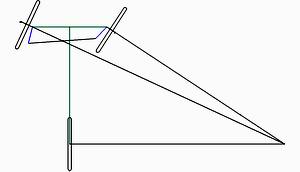 Om vi tittar på
en trike som svänger kraftigt åt höger så ser vi
att det högra hjulet svänger mer än det vänstra.
Ju snävare sväng desto mer svänger det högra än
det vänstra hjulet. Detta kallas Ackermanneffekten. Mannen
som kom på hur man skulle göra hette Rudolf Ackermann och därför
kallas det ackermanneffekten. Gradskillnaden mellan de två framhjulen
kallas ackermannvinkel.
Om vi tittar på
en trike som svänger kraftigt åt höger så ser vi
att det högra hjulet svänger mer än det vänstra.
Ju snävare sväng desto mer svänger det högra än
det vänstra hjulet. Detta kallas Ackermanneffekten. Mannen
som kom på hur man skulle göra hette Rudolf Ackermann och därför
kallas det ackermanneffekten. Gradskillnaden mellan de två framhjulen
kallas ackermannvinkel.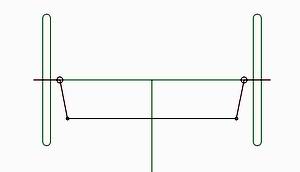
Så för att man ska kunna svänga på ett bra sätt
så måste alltså framhjulen kunna svänga olika mycket.
För att åstadkomma det så hänger man upp hjulen på
en styrled med en styrarm som sticker ut bakåt (eller framåt)
där man hänger på styrstagen. Om man satte styrarmarna
rakt bakåt (ingen vinkel) så vrider hjulen sig lika mycket,
men om man tar och vinklar styrstagen inåt mitten på triken
så kommer hjulen att svänga olika mycket.
Om du vrider vänsterhjulet tio grader åt höger, och
för att vara någorlunda normalt, så bör högerhjulet ha vridit sig
tretton grader. En större ackermannvinkel så
blir styrningen mjuk och förutsägbar utan att man får tvinga
sin trike in i kurvorna. En mindre vinkel gör styrningen aggressivare.
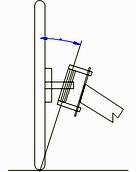
Caster beskriver vinkeln mellan styrledens lutning (sett från
sidan) och vertikalplanet.
Styrleden lutar tillbaka med positiv caster. Negativ caster används
aldrig. Castervinkeln kommer att orsaka överdriven camber (se nedan) på
framhjulen när man svänger. Detta i sin tur lyfter ena sidan
på cykel medan den andra sidan sjunker motsvarade mycket. Denna
effekt gör att när man släpper taget om styret(inte längre
trycker på det för att svänga) så kommer cykeln
att vilja återgå till ett läge där båda hjulen
pekar rakt fram. När båda hjulen pekar rakt fram så är
framändan på cykeln horisontell med marken. Att styra triken
kräver en viss kraft och när den tas bort så hjälper
tyngdkraften till för att återställa hjulen till sitt normalläge
(rakt fram). Ju större castervinkel och/eller ju tyngre trike, desto större
blir denna effekt.
En större castervinkel innebär också en större
skillnad i cambervinkeln när man svänger, denna skillnaden kompenserar
för vridningen i längsled och eventuell ihoptryckning av däcken
i kurvorna. Därav får vi att en stor castervinkel gör att
det går bättre att svänga i högre farter medan en
liten vinkel gör det lättare att svänga i låga farter.
Fortfarande är det så att teorin inte är absolut. Har
man fjädring fram så ändras castervinkleln när man
kör över gupp och gropar.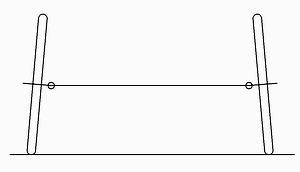
Camber är den vinkeln som blir mellan vertikalplanet och
hjulets lutning (sett framifrån). Lutar man hjulet 2 grader
innåt så har hjulet minus 2 graders camber. Positiv camber
används bara när trike plus last är så tung att cambervinkeln
innåt blir för stor (stort negativt tal). Detta gäller
först och främst de med fjädring fram. Det vanligaste är
-0.5 till -3 grader.
När man tar en kurva så vill triken vrida sig i längsleden
och med den hjulen. För att motverka det så används camber.
Detta är igentligen mer för fordon med breda däck med stor
anliggningsyta t ex bilar. Vi cyklister (trikeryttare) har ju däck
med rund profil och har med det inte så stor nytta av cambervinkel
annat än till att förstärka kurvtagningsförmågan
med. Till de få som har fjädring fram så behöver
man ha det för att anliggnings ytan på däcket alltid ska
bli så bra som möjligt. Med mjuk fjädring så behöver
man ha en större cambervinkel.
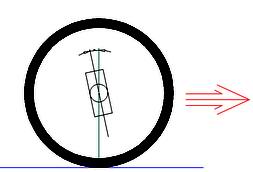
 Styrledsvinkel. (Center point steering)För att göra
det lite lättare för er som läser engelska och tänker
läsa mer om detta på engelska så tar vi namnet på
engelska. Kingpin inclination (kingpin = spindelbult). Med rätt
lutning på styrleden så vrider hjulet sig på sin kontaktyta
när man svänger. Ett annat namn för detta sätt
att ha styrningen på är centerpoint steering. En effekt av detta
är att styrning inte påverkas lika mycket av gropar och gupp
i vägbanan. Denna vinkel "ställs" in när du bygger din trike.
Inget man ändrar på efteråt
Styrledsvinkel. (Center point steering)För att göra
det lite lättare för er som läser engelska och tänker
läsa mer om detta på engelska så tar vi namnet på
engelska. Kingpin inclination (kingpin = spindelbult). Med rätt
lutning på styrleden så vrider hjulet sig på sin kontaktyta
när man svänger. Ett annat namn för detta sätt
att ha styrningen på är centerpoint steering. En effekt av detta
är att styrning inte påverkas lika mycket av gropar och gupp
i vägbanan. Denna vinkel "ställs" in när du bygger din trike.
Inget man ändrar på efteråt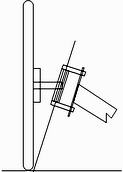
Steering offset. Ytterligare ett sätt att få
triken att bli självupprättande är att montera hjulen så
att kontaktytan ligger utanför den tänkta linjen genom styrleden.
Går att göra med brickor mellan hjulnav och styrled. Genom
att öka styrledsvinkeln så minskar man den självstyrande
effekten.
Castervinkel tillsammans med styrledsvinkeln gör att cambervinkeln
ändras i förhållande till styrutslaget. Detta gör
att hjulen lutar innåt i en kurva när man svänger. Alltså
en förbättrad kurvtagning (se castervinkeln).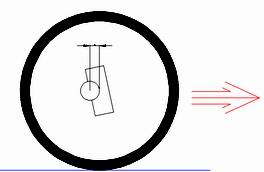
Styrled i förhållande till hjulaxeln.
Detta kan drastiskt påverka styrningen. Om axeln placeras framför styrleden
så motverkar det effekten av castervinkeln och gör styrningen
oförutsägbar. Om axeln placeras för långt bak efter
styrleden så kan styrning påverkas av ojämnheter i vägen
eller när man bromsar. Placera axeln mitt i eller bakom och inte längre
ifrån styrleden än max 15 mm.
Toe-in eller toe-out är något de flesta fordon med
2 parallella hjul använder sig av. Toe-in där hjulen pekar innåt
mot varandra, och utåt ifrån varandra vid toe-out. Noll grader
toe in/Toe out betyder att hjulen är parallella med varandra. Toe in på en
trike gör den mera stabil, tar bort fladder i hjulen på grund
av eventuella toleranser i hjulupphängningen.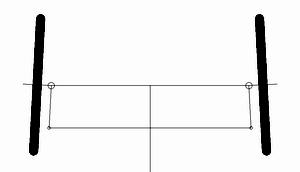 Toe-in gör den lite mer stabil under färd rakt framåt. Gör den också
lite mer aggresiv i kurvtagningen. Normala värden är -1,5 till
+1,5. Toe-in mäts mellan centrumlinjerna genom hjulen. BILD Tänk
på att ju mer toe-in du har desto mer motstånd vid färd
framåt och ett större däckslitage.
Toe-in gör den lite mer stabil under färd rakt framåt. Gör den också
lite mer aggresiv i kurvtagningen. Normala värden är -1,5 till
+1,5. Toe-in mäts mellan centrumlinjerna genom hjulen. BILD Tänk
på att ju mer toe-in du har desto mer motstånd vid färd
framåt och ett större däckslitage.
När du ställer in toe-in på din trike så ska
den vara belastad dvs du ska sitta i den. Vid nedlastning av triken så
vrids hjulen inåt. Så det är bara till att be någon
om hjälp.
Praktiskt. Jaså jaha säger du då. Vad för
nytta av detta har jag? frågar du.
För att du ska få en trike som är hanterbar och går
lätt att styra så försök att följa dessa enkla
råd, så ska det fungera.
Detta är bara rekommendationer så andra värden kan
också fungera bra. Dessa värden har fungerat för mig och
en hel del andra. Så något bra måste de vara.
En camber vinkel som är justerbar är naturligtvis det bästa.
Det kan man åstadkomma med hjälp av länköron. Se på
mina bildsidor hur jag har gjort.
Castervinkeln bör ligga inom 10-12 grader, ju större grader
desto stabilare i höga farter. Inom rimliga gränser (vinkeln).
Styrledsvinkeln 15 - 18 grader
Tänk på centerpoint steering, linjen genom styrleden som
träffar mitt i kontaktytan däck/mark.
Steering offset, helst i mitten annars utanför.
Hjulaxelns förhållande till styrleden. Helst i mitten annars max 15 mm eftersläp.
Ställbara styrlänkar för att kunna ställa in toe-in
och att styret hamnar i mitten. Kan göras med hjälp av vantskruv.
Se min bygghjälp.
Ackermann.
Vad som kan ändra ackermannvinkeln vid ett trikebygge.
Längden på din trike.
Vinkeln på styrarmen.
Längden på styrarmen,
plus ett antal olika mått som beror på hur du tänker
sätta ihop styrningen.
För att slippa tänka på hur du ska få ihop styrningen
så kan du få hjälp med att räkna ut din styrning
så att den blir så bra som möjligt.
Du får gå till
Peter Eland's site:
Ackermann steering spreadsheet (som har gjorts av Peter Eland som också ger ut VELOVISION.)
Länkarna längre ner kommer från denna sida. Börja med
Tricycle steering geometry - introduction
Olika sätt att konfigurera styrningen på.
Tricycle steering geometry - the spreadsheets
för att läsa om styrgeomtri och hur du använder dig
av filerna du hämtar.
Tricycle steering geometry - instructions
De här är filerna du kan hämta.
Tricycle steering geometry - downloads
Slutresultatet är teoretisk och baseras på en 2-dimensionell
verklighet så det är inte hundraprocentigt.
Det blir ändå tillräckligt bra.

 Tillbaka till startsidan
Tillbaka till startsidan
Författare: Göran Nicklasson

